nishimotzの日記
about me
ペットあれこれ
a11y.shuaruta
ARIA-Barriers
note
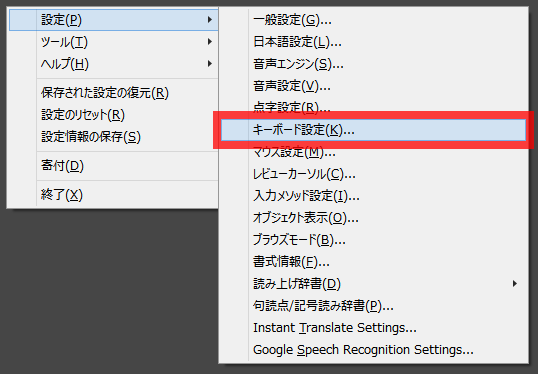
nvda-menu-04
2013年10月24日
Written by
nishimotz
in
←
nvda-menu-04
Comments
コメントを残す
コメントをキャンセル
メールアドレスが公開されることはありません。
※
が付いている欄は必須項目です
コメント
※
名前
メール
サイト
More posts
2026年2月
2026年2月1日
PyCon mini Hiroshima 会計繰越金の活用と解散について
2025年7月8日
すごい広島 with Python [98] 開催報告
2025年5月31日
GAAD Japan 2025 広島会場
2025年4月11日
PCNひろしまについて
2025年2月16日
2025年2月
2025年2月3日
2024年 秋
2024年11月24日
2024年7月
2024年7月13日
PCNひろしまの運営
2024年4月1日
YAPC初登壇、初スポンサー
2024年2月12日
YAPC初参加、初運営
2024年2月12日
2024年2月
2024年2月9日
広島国際会議場の受動喫煙対策
2024年1月26日
2024年1月
2024年1月1日
2023年12月
2023年12月1日
2023年9月
2023年9月10日
2023年8月
2023年8月4日
2023年夏
2023年7月12日
試して遊ぶ!Webアクセシビリティ
2023年5月1日
iPhone・iPad活用ラウンジ 2023年4月
2023年4月27日
コメントを残す